
En 1981, el equipo Lotus empezó a investigar sobre la suspensión activa, primero para su línea de autos deportivos Esprit como un proyecto de investigación y desarrollo, cuyos resultados serían implementados en Fórmula 1. Sin embargo, el Esprit Turbo nunca vio la luz y quedo en fase de pre producción.
En el caso de Fórmula 1, Peter Wright, uno de los encargados del área de ingeniería del equipo Lotus empezó a trabajar en el concepto con fines aerodinámicos para poder controlar los niveles de downforce producido por los autos con el tan recordado efecto suelo que marcó a la categoría durante el inicio de la década de los 80s.
Wright buscaba formas de poder mantener el chasis lo más bajo posible para tener un efecto suelo más efectivo. Algo similar a lo que hizo el Brabham BT49 con su sistema de suspensión hidráulico con el cual podían subir y bajar los faldones para así ganar velocidad y engañar a los oficiales de la FISA con su polémica regla de los 6 cm sobre el espacio que debía existir entre el chasis y el asfalto.
Otro propósito era solucionar un problema constante de ese entonces como era el Porpoising, un fenómeno aerodinamico en donde el cambio en el flujo de aire por debajo del chasis producía un violenta oscilación en las rectas y que solo paraba cuando el piloto pisaba el freno. En un principio, Lotus buscó solucionar el problema endureciendo la suspensión, pero las oscilaciones seguían de forma violenta y trasladándose a los neumáticos.

«Se empezó a volver técnico al final de 1977. Pusimos un sistema de datos que hizo Cranfield Flight Instrumentation para poner en un auto para medir y tener un mejor entendimiento del efecto suelo. De nuestro análisis vino la definición de activo» rememoró Wright en la revista Motorsport Magazine.
La idea de Lotus pasó por un proceso de investigación liderado por el profesor David Williams del Instituto de Tecnología de Cranfield. Williams propuso un sistema hidráulico computarizado con un amortiguador sintético que reemplazaría a los resortes y amortiguadores de un modelo de suspensión convencional.
Según Williams eso podría solucionar los problemas que Lotus estaba teniendo como también poder entregar una constante altura entre el chasis y la superficie. El profesor decía también de que si se reemplazaba el uso de amortiguadores rígidos, la variación de las cargas en los neumáticos desaparecería, aumentando los niveles de agarre en las curvas.
La propuesta de la nueva suspensión se convirtió en el Plan B, el plan principal era el Lotus 88 con chasis doble que iba a debutar en el inicio de la temporada 81′ en Long Beach. No obstante, el nuevo modelo duro menos de un día antes de ser prohibido por la FISA tras los reclamos hechos por los demás equipos sobre la legalidad del auto. La temporada partió cuesta arriba para el equipo de Chapman con el veto y la detención de David Thieme de la petrolera Essex, la auspiciadora principal de Lotus. El empresario estadounidense fue detenido en un aeropuerto suizo por acusaciones de delitos económicos, él salió de prisión dos semanas después, pero para finales de esa temporada Essex ya era historia.
Chapman quería que sus autos corrieran con la suspensión activa para 1983 e hizo un detallado calendario para su implementación que tendría una serie de pruebas y proceso investigativo hecho con los autos Esprit durante seis meses para posteriormente avanzar al equipo de Fórmula 1 con una investigación que iba a durar la misma cantidad de tiempo.
Williams creó el programa de control y la computadora con la cual iba a funcionar el sistema de la suspensión. La investigación hecha en los autos Esprit con Elio de Angelis fue un éxito. El piloto francés manejó el auto con los sistemas durante un día de pruebas en el circuito de Snetterton, mientras Williams desde el asiento del copiloto mejoraba la configuración previo a la llegada de Chapman para poder ver en primera persona el manejo del auto y así dar su visto bueno.
El circuito de Norfolk iba a ser escenario de la primera prueba en la historia de un Fórmula 1 con ese sistema. 16 de diciembre de 1982 iba a ser la fecha, pero se terminó recordando por el repentino fallecimiento del fundador de Lotus Colin Chapman, de un infarto al corazón mientras dormía en su casa.
La muerte de Chapman puso en pausa el proyecto, a su vez dio inicio al famoso mito de que él fingió su muerte, huyendo a Brasil para evitar a la justicia británica por no devolver millones de libras esterlinas en dineros públicos que recibió para el desarrollo del DeLorean DMC-12.
Tras pasar un año congelado, la idea de la suspensión activa volvió a estar en carpeta dentro del equipo para ser implementado en el Lotus 92, el auto de la temporada 1983 se caracterizaba por no correr con amortiguadores. Sin embargo, el chasis duró media temporada con Nigel Mansell habiendo corriendo la mayoría de las carreras con ese sistema, el punto más alto fue el punto logrado en Detroit con un sexto lugar.
Mansell no estaba a gusto corriendo con la suspensión activa por su excesivo peso (30 kg) que le hacía perder potencia al motor V8 Ford Cosworth, como también por todos los problemas que tuvo durante el desarrollo del sistema que le hizo pasar una serie de sustos en la pista. Para Wright, «Mansell ha dicho algunas cosas las cuales me han sorprendido. Fue algo traumático, pero no fue ni la mitad de las cosas que él dijo».
Nuevamente la suspensión activa volvió al congelador hasta 1987 cuando nuevamente lo reintrodujeron para el chasis 99T. Otro equipo que se la jugó con el sistema fue Williams con el FW11B. El auto diseñado por Frank Dernie instaló un sistema de suspensión similar al activa, pero que era más bien reactiva y que tenía el mismo propósito que Lotus en un inicio; ganancia aerodinámica al producir una altura constante entre el chasis y el asfalto.
La implementación de la suspensión activa en el 99T fue de ensayo y error como lo recordó Wright en Motorsport Magazine debido a la complejidad para desarrollar el sistema en la década de los 80s por tercera vez.
«Recuerdo estar en una prueba en Donington Park, cerca de la medianoche aún estábamos tratando de hacer trabajar la suspensión activa con el turbo y ‘Duca’ me dice, ‘esto solía ser divertido y ya no lo es». – Peter Wright hablando para Motorsport Magazine
Sin embargo, Wright y Ducarouge sabían del gran potencial que tenían entre manos si tan solo podían arreglar los problemas de confiabilidad del motor turbo Honda que combinados al funcionamiento de la suspensión activa estaban causando dificultades en el desarrollo del 99T.
Mejor que el sexo – Gran Premio de Mónaco de 1987 y la tercera reencarnación
Durarouge paso horas en el túnel de viento buscando forma de compensar la perdida del 5% de potencia de los motores Honda cuando el sistema hidráulico de la suspensión activa estaba en uso. El 99T se caracterizo por ser un auto más pequeño en comparación a sus rivales con tal de tener una mejor respuesta inmediata.
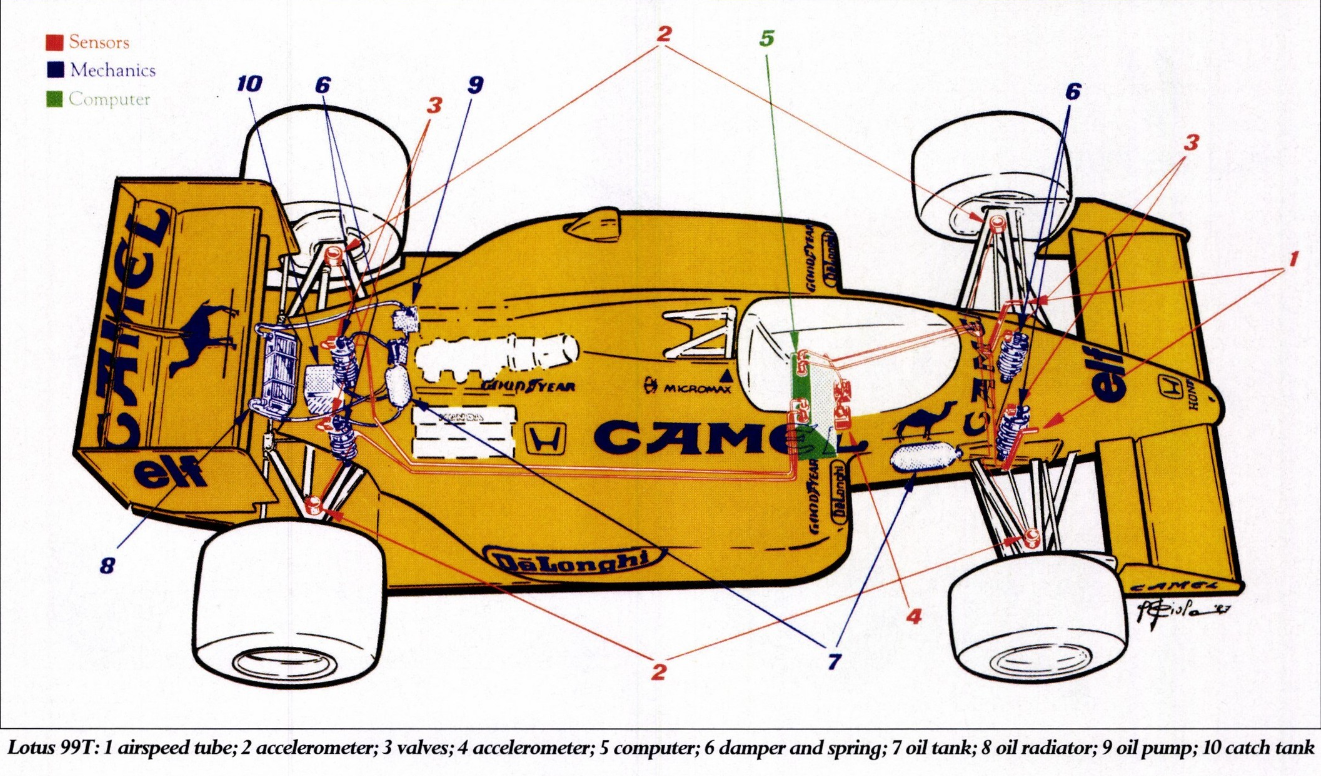
La suspensión pesaba más de 20 kg y tenía una bomba hidráulica que se alimentaba de la potencia del motor para distribuir el fluido en las cuatro esquinas del 99T. Mediante actuadores se controlaba las válvulas de presión, las cuales recibían la información de diferentes sensores ubicados en distintos puntos del chasis, los cuales eran recopilados por dos tubos Pitot que estaba instalados en la suspensión delantera. Una computadora ubicada por debajo del asiento era el cerebro del sistema y generaba una serie de parámetros y millones de cálculos para su funcionamiento.
Esto llevo a un sistema de suspensión que ajustaba su altura de manera constante para llegar a su nivel ideal, eliminando los movimientos bruscos. En cuanto a la conducción, Ayrton Senna y Satoru Nakajima podían correr a mayores velocidades en curva debido a que los neumáticos tenían un parche de contacto más grande.
La clave para su funcionamiento ideal estaba en los neumáticos, en saber cuando estaban en su marco ideal de rendimiento y con ello lograr reducir su desgaste, corriendo con menor carga aerodinámica y ganando más velocidad en las rectas.
Para finales de esa década, los equipos ya estaban empezando a diseñar la parte trasera de sus autos en forma de botella de Coca Cola, con el propósito de una mayor eficacia aerodinámica con los flujos de aire. Lotus tenía uno de los autos más pequeños de la grilla, además de tener una carrocería más estrecha que dejaba un espacio más reducido para instalar el motor, transmisión, suspensión y electrónica, pero garantizaba una mejor respuesta en pista.
«Tuvimos que incluir muchos fluidos, tanques y servos, eran cosas que no estaban diseñadas para Fórmula 1. Recuerdo que en esos años un equipo no podía crear sistemas propios de electromecánica y electrohidráulico. Tenías que tomar lo que estuviera disponible, incluso si provenía de la industria aeronáutica». – Martin Ogville, ingeniero del equipo Lotus hablando para Motorsport.com
Senna le dio la primera victoria a un auto con suspensión activa como también fue la primera de seis victorias en las calles del principado a lo largo de su trayectoria en Fórmula 1. Una vez terminada la carrera y de camino al podio gritaba por la radio ‘¡Wow! ¡Esto es mejor que el sexo!’
Cuando la suspensión estaba en su punto máximo de rendimiento, Senna podía sacar grandes ventajas como era el poder correr carreras con un solo set de neumáticos sin la necesidad de entrar a pits como se pudo cuando ganó en Mónaco.
Para Ogville, el gran plus de Senna estaba en como él interpretaba y reaccionaba a los que le decía el auto cuando corría al limite. Al correr con la suspensión activa, las sensaciones del piloto eran casi nulas por lo que él se guiaba a base de instinto o señales visuales. «La perdida de sensación para el piloto era el verdadero inconveniente de la suspensión activa que la perdida de potencia o el peso extra». rememoró años después para una entrevista a Motorsport.com
La victoria de Senna en las calles del principado sirvió para darle validez al sistema, que aunque era usado por dos equipos, aún estaba en una fase primitiva, en donde los equipos tenían que comprar las piezas a empresas del rubro aeronáutico que hacerlas por cuenta propia. Dos semanas después hizo el bis en las calles de Detroit, corazón de la industria automotriz y la «carrera de casa» de Lotus que en ese entonces era propiedad de General Motors.
«Recuerdo estar en una reunión de pilotos en Silverstone en donde Senna paso 15 minutos hablando sobre una curva durante una vuelta en particular. Eso me impresiono mucho. Él era capaz de analizar exactamente lo que el auto estaba haciendo en la entrada, vértice y salida y también lo que no estaba haciendo que necesitaba hacer». – Martin Ogville
Senna corrió las 63 vueltas sin tener que entrar a pits para cambiar neumáticos, mientras que Mansell, el poleman entró por neumáticos nuevos, pero tuvo problemas con uno de los neumáticos traseros y perdió el liderato de la carrera en manos del piloto de Lotus. Nuevamente Senna ganó y sin un notorio desgaste físico como se pudo ver en sus manos al correr sin vendaje. Mientras que Mansell con un auto de suspensión pasiva sufrió de calambres que le hicieron perder posiciones hasta terminar en el quinto lugar.
«Ayrton hizo un muy buen análisis: ‘En última instancia, el auto es igual de rápido con la suspensión activa pero, en la clasificación, tarda mucho más en hacer funcionar los neumáticos. Sin embargo, una vez que lo consigues, puedes mantenerlo, mientras que el coche pasivo alcanza un pico y se cae. Por eso, solía esforzarse mucho en la puesta a punto para la carrera. Tenía un auto que cuidaba sus neumáticos y eso le permitía ganar». – Peter Wright
Pese al gran éxito del sistema, el equipo descontinuó su desarrollo por cuestiones económicas. En un inicio, el desarrollo fue financiado por Lotus Engineering, mandando dos ingenieros a todas las carreras para trabajar exclusivamente en la preparación del sistema. No obstante, Peter Warr, director del equipo en ese entonces decidió descontinuar el proyecto para 1988 por motivos económicos y por cuarta vez volvió al congelador hasta 1992.
El otro lado de la vereda: Williams
Williams fue el otro equipo que junto a Lotus implementaron la suspensión activa para 1987 y cuyo desarrollo estuvo a cargo de Frank Dernie, quien además diseñó el FW11B. La prioridad para el diseñador británico estaba en el rendimiento aerodinamico y eso podría lograrse si se tenía un altura constante entre el chasis y la superficie. «Me importaba un bledo sobre la calidad de la conducción. Al piloto se le pagaba para lidiar con los baches. Todo lo que yo quería era hacer más veloz el auto» recordó el veterano ingeniero a Motorsport Magazine.
Con tal de lograr ese objetivo, Dernie fue a la compañía británica Automotive Products con la idea de utilizar el sistema de suspensión activa hecho para Ambulancias en los monoplazas y que era menos complejo al que utilizaba Lotus. Sin embargo, los limitaba en no poder optimizar la carga de los neumáticos o su parche de contacto por lo que la velocidad en curvas iba a generarse exclusivamente por la aerodinámica y no por grip mecánico, ya que según él era una falacia.

El sistema hecho por AP era simplista y no «activo», sino más bien que «reactivo» al ser impulsado por un mecanismo hidráulico y no por sensores o computadoras como fue en el caso de Lotus. El primer prototipo fue desarrollado en 1986 y se instaló en el FW10 para su fase de desarrollo e investigación.
A diferencia del diseño original los Struts de acción simple estaban puestos en la parte trasera, mientras que los de doble acción estaban puestos adelante.
Williams adaptó la versión de AP, la cual contaba con tres resortes – amortiguadores, cuatro actuadores hidráulicos, tres válvulas de control, una bomba hidráulica, el tanque y acumulador hidráulico. Dos de los actuadores eran de doble acción y permitían que el pistón se pudiera mover en ambas direcciones, mientras que los otros dos actuadores eran de acción simple y con el pistón yendo hacía una sola dirección; abajo.

Las válvulas de control eran mecánicas y se accionaban mediante una varilla que estaba dentro del brazo de suspensión, incorporando una disposición de masa – resorte – amortiguador que actuaba como un filtro mecánico de paso bajo, evitando una reacción brusca del auto al momento de tener movimientos más intensos. Esto permitía una mejor respuesta ante los impulsos de baja frecuencia causados por el rebote, cabeceo y balanceo del auto en pista.
La suspensión reactiva fue instalada inicialmente en el Williams FW11B de Nelson Piquet, el cual hizo todo el trabajo de desarrollo del sistema tras la negativa de Mansell de correr con dicha tecnología dada su mala experiencia con Lotus. El piloto brasileño lo debutó en el GP de Italia en Monza desde la Pole Position y ganando la carrera. Finalmente el británico lo uso para el GP de Portugal y ganó dos carreras en España y México en medio de una remontada por el campeonato ante su compañero de equipo que acabó de forma abrupta en la clasificación del GP de Japón con un accidente y el tricampeonato de Piquet por default.
Pese al éxito inicial y al igual que Lotus, el equipo decidió no correr con el sistema a tiempo completo en 1988. El motivo no fue económico, sino que por un problema con la reserva del fluido hidráulico. «La entrada de la bomba hidráulica siempre estaba cubierta. El tanque de aceite en el FW12 no fue lo suficientemente buena. No siempre se presurizaba y eso hacía que el aire entrase al sistema. El auto era veloz por tres o cuatro vueltas, pero una vez con aire dentro del sistema era inmanejable. No pudimos encontrar que el problema era con la reserva hasta mucho después» rememoró Dernie a Motorsport Magazine.
Williams congeló la suspensión activa por las siguientes tres temporadas, mientras Dernie trabajaba detrás de escena en su versión 2.0 que debuto en 1991 con el FW14 y que al año siguiente con su versión B llegaría a ser el auge de dicha tecnologías en Fórmula 1 en los inicios de la década de los 90s y un 1992 para recordar con Nigel Mansell logrando su tan esquivo campeonato mundial de Fórmula 1.
